V-REP + OpenAI Gym = RL
V-REP: The powerful, user friendly, and free-to-use robot simulation platform for researchers and hackers. Supports basically everything.
OpenAI Gym: The de facto standard interface for Reinforcement Learning.
So, how can we hook V-REP onto an Gym environment, so that we could perform 3D robotic simulations step-by-step in Python?
Remote Controlled V-REP
V-REP provides a set of APIs accessible from socket, with dynamic libraries and binding for Python, Lua and a bunch of languages.
You will have to write some python code to:
- Start a V-REP instance from Python
- Connect to the instance you've started
- Load the scene file (the scene we are about to simulate)
- Start the simulation
- Step the simulation
- Read/Write something from/to V-REP to control the simulation and record data
- Goto 5 several times
- Stop the simulation
- (Important) Check to see if the simulation actually stopped.
- Goto 4 several times
- Kill the V-REP instance from python if no longer needed.
Which means a lot of code.
Good news: I wrote a library called vrepper, available at https://github.com/ctmakro/vrepper, that could correctly handle the routine mentioned above. You should at least look at the code - which may save you a lot of precious time, that I've spent already.
You may expand your own functionality. Consult V-REP's Remote API manual.
An example on the usage of vrepper
Here I made a 3D cart-pole environment in V-REP.
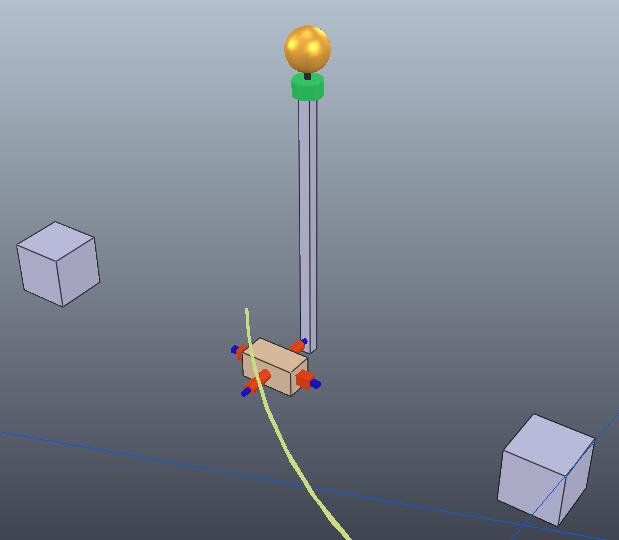
It contains camera output rendered with OpenGL in V-REP, so that you could see how the simulation went with V-REP running in headless mode (mode without GUI).
video demonstration below:
To run the example above, here's what you have to do:
# install V-REP 3.40 (latest version as the time of writing) for your operating system. Make sure the vrep executable is in your PATH variable.
$ pip install tensorflow numpy
$ pip install canton
$ pip install opencv-python # won't always work. Just make sure you have OpenCV3 installed, and you could "import cv2" in Python.
$ git clone https://github.com/ctmakro/cv2tools # visualization utility
$ pip install -e ./cv2tools
$ git clone https://github.com/ctmakro/vrepper
$ pip install -e ./vrepper
$ git clone https://github.com/ctmakro/gymnastics
$ cd gymnastics
# then simply follow the video:
$ ipython -i test_cartpole.py
agent.load_weights() # load the neural network weights
test()
Happy learning!