Generative Adversarial Network 生成式对抗网络
更新:我用Keras加一点点Tensorflow实现了一个非常快的GAN,详见 <fast_gan_in_keras.html>
常见的神经网络可以分为“生成式模型”和“区分式模型”。区分式模型(discriminative model)尝试在输入特征之间建立近似的and或者or的关系,以实现对输入进行分类的目的。
比如我们用猫和老虎的脸部图片,训练一个神经网络对物种进行分类,网络通常会这么做:

也就是通过条纹的强度,来区分猫和老虎。
如果我们有意增加一些带有条纹的猫的图片,对网络进行训练,为了更明确地区分猫和老虎,网络可能会这么做:

我们发现,区分式模型具有“特征惰性(feature laziness)”,也就是神经网络跟人一样善于偷懒,倾向于用最明显、最简单的特征完成分类任务。假如我们现在用这个神经网络对猫和老虎的躯干图片进行分类,准确率会非常低。
为了提高区分式模型的性能,常见的做法就是准备成千上万张不同角度、不同品种的猫和老虎的图片,对网络进行训练。通常会得到这样的结果:

通过增加训练数据的量,模型能从数据中学习到更多用于区分物种的特征。
问题是,模型仍然只学到了猫和老虎的各种区别,而无法学习猫和老虎共有的特征(比如都有尾巴,腿都长在躯干下面)。
如果这时我们将这个网络用作识别狮子和豹,准确率会很低,于是又要再准备大量的训练数据。相比之下,人类只需要几张狮子和豹的图片就足够了。这种对人工标记训练数据的无限制的需求,是区分式模型的噩梦。
Data Shortage
正是由于“特征惰性”,很多做机器学习的“数据科学家”们经常会跟其他部门的同事发生如下对话:
-
请问你们能不能做xyz……
-
数据在哪里?没数据免谈
-
谷歌出了个新的abc功能……
-
那是因为他们积累了足够的用户数据,怎么弄都行
-
项目怎么还没做完……
-
经费不够,不然就请人标注了
Unsupervised Learning came to be rescued
自然界中带有明确分类标签的数据是非常稀少的,特别是这些标签只对人类有意义,因此只能由人类来进行标示,产生了很大的工作量。然而人类在了解世界的过程中,并不需要将一切所见所闻都打上标签,那么人类是怎样实现高效学习的呢?
神经科学理论认为,人类学习源自对周围环境的预测。如果身边的一切事物跟预想的一样规律运作,学习就不会发生;如果所预测的运作与观测不符,学习就会发生。这种能力能够帮助我们逐渐适应并利用环境。
回到对猫、老虎、狮子、豹进行分类的例子上来。人类通过大量观察各种不同的动物(河马、大象、狗、驴等等),可以在大脑中建立这样的神经网络:

即便这些训练数据都不带标签,人类也能从中学到一些关于动物的知识,比如动物都是一个躯干旁边四条腿,如果在躯干四周看不到腿,或者看不到尾巴,很可能就不是动物(图中的not_animal)。
在掌握“腿”和“躯干”之间的互相依赖关系这样的抽象特征之后,再去对猫、老虎、狮子、豹进行分类,人类就能够将这些概念与图中的具体动物进行匹配,从而减少需要学习的特征数量,降低学习难度。例如,我们看到图片中的毛发,就可以根据毛发位于躯干四周的具体位置,来决定毛发究竟是属于躯干,还是属于腿部、尾部、耳朵,而不需要再从数据中专门学习“腿部毛发”、“尾部毛发”这样的概念。

结果就是,对于新的分类任务,只需要使用很少的带标签数据,就能训练出非常高效的分类器。历史上有一位长者常说他“见的多了”,“哪个国家没去过”,不管是跟找茬的美国记者还是跟赛跑的香港记者一样能“谈笑风生”,其实是一样的原理。
在ML领域,这类对不带标签的数据进行学习并掌握概括性特征的方法,被归类为Unsupervised Learning(非监督式学习)。由于这方面商业兴趣不大,所以应用一直滞后于Supervised Learning(监督式学习,或带标签学习)。
GAN
可以这么说:监督式学习是用神经网络拟合 p(标签|数据),而非监督式学习是用神经网络拟合 p(数据),即从数据中寻找具有代表性、概括性的特征(或者说,适应数据特征之间的条件概率分布)。
在没有标签的情况下,我们无法通过标签提供的误差梯度对网络进行训练,必须要通过其他方法定义误差函数以产生误差梯度。
这方面的先驱是Hinton提出的Restricted Boltzmann Machine;其他方法还包括 Variational Auto Encoder等等。在此略过不做介绍。
真正让人眼前一亮的,是最近搞起的Generative Adversarial Network,即GAN。
GAN方法需要两个神经网络,一个生成网络G和一个区分网络D。

生成网络G的输入是一个矢量,输出一张图片; 区分网络D的输入是一张图片,输出一个(0,1)之间的概率。
区分网络D的任务是辨别输入的真伪。如果输入图片来自训练样本(x),则应该输出接近1的概率:如果输入图片来自生成网络G,则应该输出接近0的概率。
即: D(G(z)) -> 0, D(x) -> 1
首先训练D:
maximize log(D(x)) + log(1-D(G(随机矢量)))
这会提高D对训练样本和生成样本的区分能力。
然后训练G:
maximize log(D(G(随机矢量)))
这会提高G生成样本对D的欺骗能力。
如此循环下去,G会生成在特征上越来越接近训练样本的图片;而D会对训练样本和生成样本之间的差异(也就是训练样本不同特征之间的相互依赖关系)越来越敏感。于是很多人将GAN中的G用作图像生成、图像修补、图像超采样等领域,获得了非常好的效果。
2017-03-04: DCGAN已经不是state-of-the-art,请参考本博客另一篇LSGAN.
我根据DCGAN的Torch源码,利用Keras实现了一个GAN。训练样例是CIFAR-10中央16x16。以下是经过训练之后,G生成的样本:
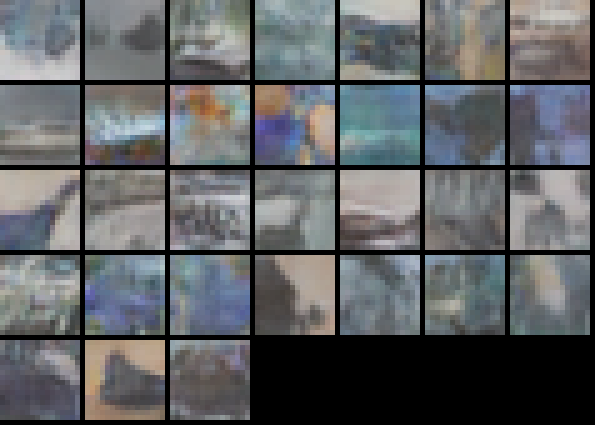
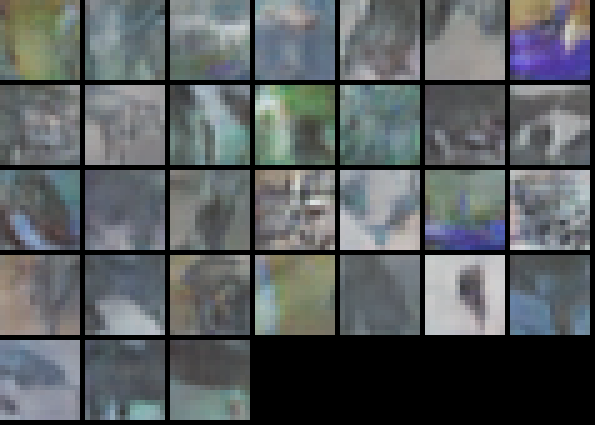
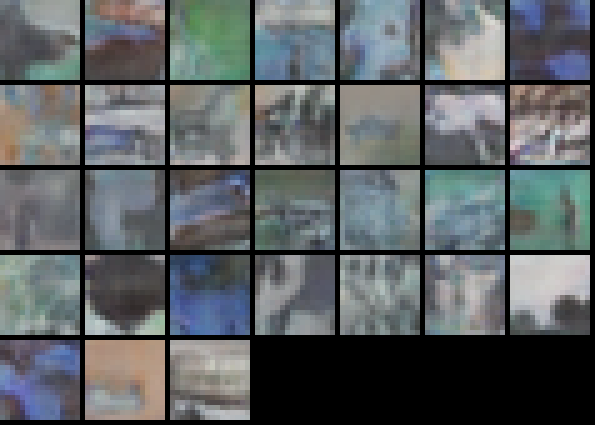
从远处来看,这些样本非常像真实的自然照片,近看才发现其实什么也不像。这说明G网络已经大致掌握了训练样例各个像素之间的条件概率分布,例如背景前景颜色的分布,动植物特征的分布等等。这同时也说明D网络现在已经掌握了训练样例中的这些特征(并能够利用这些特征区分真假图片)。而整个训练过程并不需要提供与图像内容相关的任何标签。
很多GAN相关的paper也提到:在大量无标签数据上用GAN方法进行训练之后,将D网络用于分类,只需要很少标签就可以在短时间内达到非常高的准确率。
Network Capacity
由于GAN的拟合对象是p(data)而不是p(label|data),即data中与label无关的部分也得拟合,因此需要的网络容量会大大超过对data按label分类的分类器网络,不然生成的样本质量会很差。
这其实就类似于:一位优秀的艺术家和一位普通人经过一个房间,要求他们用笔画出房间里的内容。
- 优秀的艺术家(生成式模型)可以在纸上还原房间的所有细节(不管是否重要);
- 而一般人(区分式模型)只能在脑海里还原很少一部分、对完成日常任务有帮助的细节。
这也可以解释为什么很多同学的英语填空选择很高分,但是作文和口语却很差:前者是区分式模型,后者是生成式模型,所需的训练量和容量差两个数量级。
GAN Training Tricks
在所有的tricks里面,亲测最有效的是batch discrimination和single-sided label smoothing.
G网络有一个取胜策略:令生成的每张图像都长得很像训练样例中的某(几)张图片,简称mode collapse。后果就是每次G网络生成的结果全都一样,D网络却分辨不出来。
解决方法:在D网络中的每一层,计算G网络生成的图像之间的相似度,并把相似度作为feature map输入到下一层,这样D网络就可以利用相似度信息识别出G网络生成的相似图片,以鼓励G网络生成具有多样性的图片。
-
Batch Discrimination
在网络的每一层,对于每个minibatch中的每个sample,求其所有feature maps到其他sample的feature maps的距离,并将此距离作为一个feature map合并到其feature maps中。不同的paper对此有不同的实现方式,我的实现方式很简单,见下面的concat_diff函数:
# Keras w/ TensorFlow def concat_diff(i): # i -> Tensor(batch,height,width,features) bv = Lambda( lambda x:K.mean(K.abs(x[:] - K.mean(x,axis=0)),axis=-1,keepdims=True) )(i) i = merge([i,bv],mode='concat') return i def dis2(): # discriminative network, 2 inp = Input(shape=(16,16,3)) i = inp ndf=16 def conv(i,nop,kw,std=1,usebn=True): i = Convolution2D(nop,kw,kw,border_mode='same',subsample=(std,std))(i) if usebn: i = bn(i) # batch normalization i = relu(i) return i i = conv(i,ndf,4,std=1,usebn=False) i = concat_diff(i) i = conv(i,ndf*2,4,std=2) i = concat_diff(i) i = conv(i,ndf*4,4,std=2) i = concat_diff(i) i = conv(i,ndf*8,4,std=2) i = concat_diff(i) i = Convolution2D(1,2,2,border_mode='valid')(i) i = Activation('linear',name='conv_exit')(i) i = Activation('sigmoid')(i) i = Reshape((1,))(i) m = Model(input=inp,output=i) mf = Model(input=inp,output=i) mf.trainable = False return m,mf -
Single-sided Label Smoothing
这是D原本的cost function:
loss = - (log(1-D(G(z))) + log(D(x))) # without s-side lbl smoothing麻烦的是,如果D过于占上风(将训练样例和生成图片分得太清楚),G的参数梯度就会过大,有可能导致G网络无法收敛。
因此在计算binary cross-entropy函数的时候,可以将训练样例的概率目标调低一点,比如从1.0调到0.9:
loss = - (log(1-D(G(z))) + 0.1 * log(1-D(x)) + 0.9 * log(D(x))) # with s-side lbl smoothing由于只修改了训练样例的概率目标,这种方法称为单边标签平滑。
-
My Generative Network implementation
# Keras w/ TensorFlow def gen2(): # generative network, 2 inp = Input(shape=(zed,)) i = inp i = Reshape((1,1,zed))(i) ngf=16 def deconv(i,nop,kw,oh,ow,std=1,tail=True,bm='same'): global batch_size i = Deconvolution2D(nop,kw,kw, subsample=(std,std), border_mode=bm, output_shape=(batch_size,oh,ow,nop) )(i) if tail: i = bn(i) # batch normalization i = relu(i) return i i = deconv(i,nop=ngf*8,kw=2,oh=2,ow=2,std=1,bm='valid') i = deconv(i,nop=ngf*4,kw=4,oh=4,ow=4,std=2) i = deconv(i,nop=ngf*2,kw=4,oh=8,ow=8,std=2) i = deconv(i,nop=ngf*1,kw=4,oh=16,ow=16,std=2,tail=False) i = relu(i) i = deconv(i,nop=3,kw=4,oh=16,ow=16,std=1,tail=False) i = Activation('tanh')(i) m = Model(input=inp,output=i) mf = Model(input=inp,output=i) mf.trainable = False return m,mf
最后
推荐看Ian Goodfellow对GAN的专题视频。目前效果最好的2D图像生成式模型是PPGN,不妨关注。